
Nowe podejście do orientacji chmur punktów z naziemnego skaningu laserowego oraz gęstego dopasowania obrazów
Kierownik projektu: dr inż. Jakub Markiewicz
Geometryczna dokumentacja architektoniczna jest nieodłączną częścią inwentaryzacji zabytkowych miejsc i obiektów dziedzictwa kulturowego, ale również może być wykorzystywana w zarządzaniu i ochronie obiektów dziedzictwa kulturowego. Do inwentaryzacji zabytków architektonicznych i archeologicznych od szeregu lat wykorzystywano metody geodezyjne i fotogrametryczne, bazujące także na naziemnym skaningu laserowym oraz automatycznym przetwarzaniu m.in. zdjęć naziemnych pozyskiwanych niemetrycznymi aparatami fotograficznymi. Z tego też powodu generowanie precyzyjnej, a jednocześnie wysokiej rozdzielczości dokumentacji architektonicznej, pozyskiwanej ww. metodami, jest kwestią wciąż otwartą i stanowiącą wiele wyzwań. Chociaż algorytmy przetwarzania danych są intensywnie rozwijane to ograniczenia w wykorzystaniu różnych sensorów pomiarowych są nadal problemem który należy rozwiązać.
W wielu zadaniach z zakresu pomiarów geodezyjnych/fotogrametrycznych pierwszym istotnym etapem, wpływającym na dokładność i szczegółowość wynikowej dokumentacji, jest zaprojektowanie, założenie i pomiar punktów osnowy fotogrametrycznej umożliwiającej geolokalizację danych pomiarowych i produktów powstałych na ich podstawie. Sygnalizowane punkty osnowy wykorzystywane są do wielu różnych celów np. pomiaru szczegółów terenowych, orientacji chmur punktów z TLS czy do przetwarzania zdjęć naziemnych (SfM) celem nadania skali modelowi obiektu uzyskanego ze zdjęć i wpasowania w przyjęty układ odniesienia.
Powszechnym rozwiązaniem pomiaru osnowy fotogrametrycznej są klasyczne pomiary kątowo – liniowe za pomocą tachimetru elektronicznego oraz opracowanie wyników poprzez niezależne wyrównanie obserwacji metodą najmniejszych kwadratów dla sieci poziomej oraz sieci wysokościowej. W przypadku przetwarzania danych TLS orientacja chmur punktów wykonywana jest przy wykorzystaniu dwóch podejść: metody orientacji punktowej (opartej na punktach wiążących, które mogą być wykonywane automatycznie, półautomatycznie lub ręcznie, ang. point-based registration) oraz metody opartej na automatycznym wykryciu w chmurze punktów cech charakterystycznych (tzw. keypoints) przy wykorzystaniu metody featured-based registration.
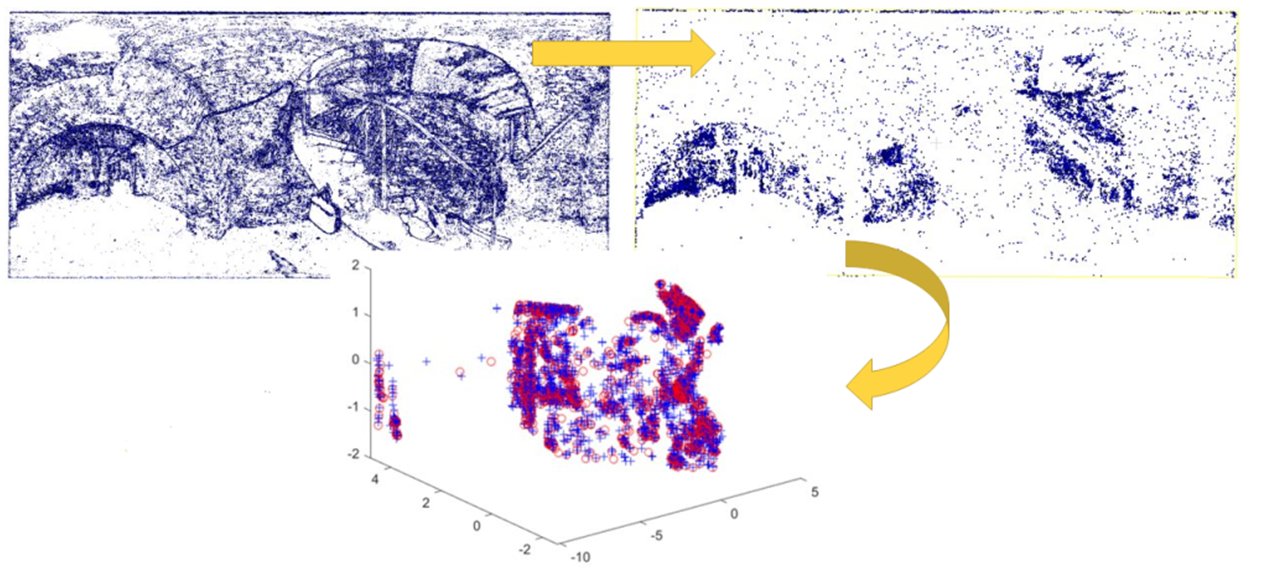
W ramach projektu przygotowana została autorska metoda wykrywania punktów wiążących na chmurach punktów z TLS bazująca na konwersji chmury punktów do postaci rastrowej
i wykorzystaniu detektorów punktowych (FAST, BRISK) oraz powierzchniowych (typu blob, SIFT, SURF CenSure oraz ASIFT, ASURF, etc.). Wykryte punkty posłużyły jako punkty wiążące pozwalające na wzajemną orientację danych TLS, a na podstawie sygnalizowanych punktów osnowy geodezyjnej wykonana została transformacja 3D do zewnętrznego układu odniesienia. Podejście bazujące na analizie detektorów i dopasowaniu deskryptorów dedykowane jest do przetwarzania zdjęć cyfrowych dlatego też wykorzystanie ich do orientacji chmur punktów z naziemnego skaningu laserowego wiązało się z ich modyfikacją polegającą na połączenia algorytmów widzenia maszynowego (Structure-from-Motion - SfM), zaawansowanych metod statystycznych (w tym machnie learning) dopasowania deskryptorów oraz metod stosowanych w geodezji i fotogrametrii (m.in. metody najmniejszych kwadratów, integracji danych pomiarowych), w celu podwyższenia dokładności poszczególnych etapów przetwarzania danych z naziemnego skaningu laserowego (TLS) oraz zdjęć naziemnych
|
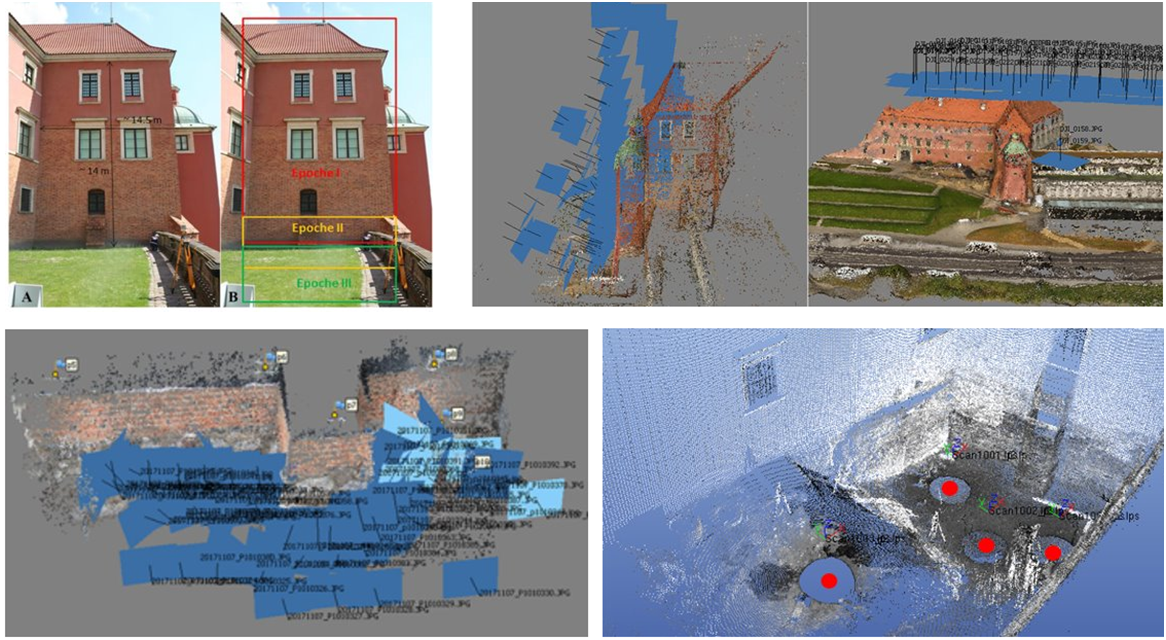
Rys. 2 Przykład danych wieloźródłowych pozyskanych z naziemnego skaningu laserowego, gęstego dopasowani obrazów z bezzałogowego statku latającego i zdjęć naziemnych. |
Równoważną metodą, wykorzystywaną do generowania dokumentacji fotogrametrycznej jest metoda oparta na algorytmach SfM/MVS i zdjęciach naziemnych. Planowane jest wykorzystanie nowatorskiego sposobu wagowania obserwacji oraz zaproponowanie metody uczenia maszynowego do eliminacji obserwacji odstających i odpowiedniego doboru punktów w procesie wyrównania obserwacji. W celu podwyższenia dokładności orientacji danych oraz jakości wyznaczanych parametrów kamery, zaproponowane zostało podejście bazujące na integracji chmur punktów TLS (przetworzonych do postaci rastrowej) oraz zdjęć naziemnych. W ramach tego zadania planowana przetestowano m. in.: (1) dokładność procesu orientacji zdjęć przy wykorzystaniu podejścia bazującego na analizie macierzy kowariancji, (2) możliwość wykonania integracja chmur punktów TLS i powstałych z przetwarzania obrazów w oparciu o klasyczne podejście bazujące na sygnalizowanych punktach osnowy fotogrametrycznej, (3) dokładność całościowego wyrównanie danych pomiarowych pozyskanych z różnych źródeł.
|
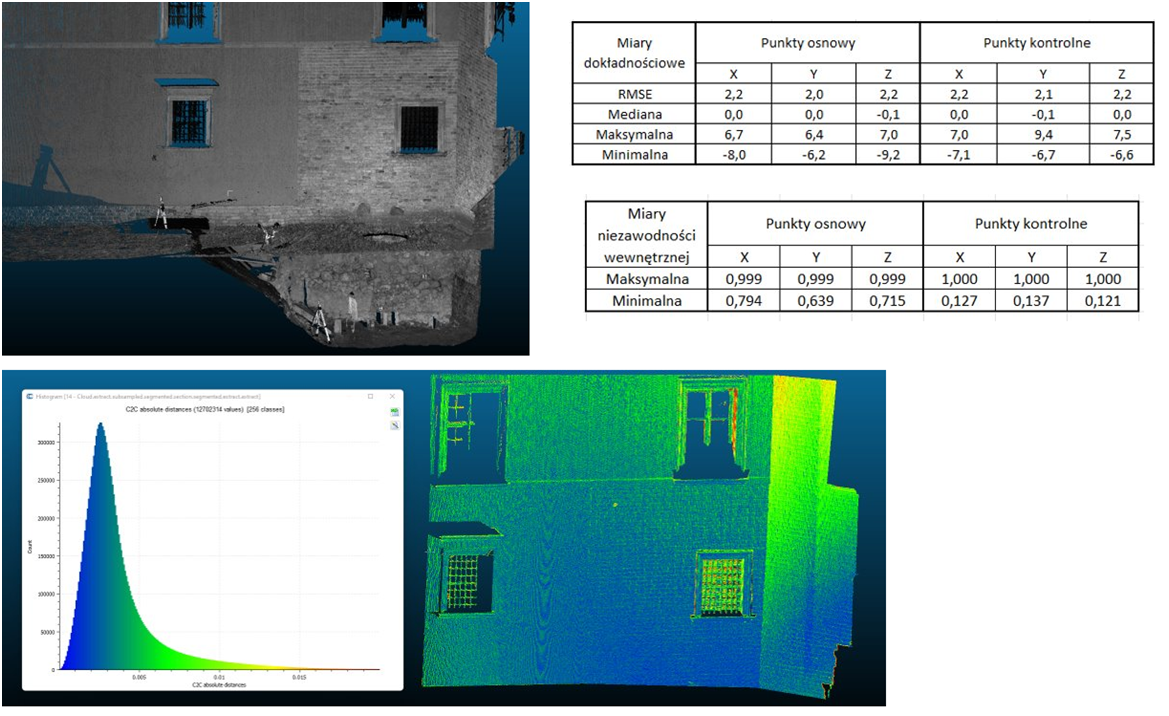
Rys. 3 Przykład orientacji chmur punktów z naziemnego skaningu laserowego oraz zdjęć naziemnych wraz z wynikami rozszerzonej analizy statystycznej orientacji chmur punktów. |
Wyniki analiz pozwoliły na zaproponowanie wieloetapowego automatycznego procesu orientacji wielosensorowych danych pomiarowych z jednoczesną pogłębioną analizą dokładnościową uzyskanych wyników. Przyczyniło się to do podwyższenia dokładności końcowej dokumentacji architektonicznej z jednoczesnym wyeliminowaniem błędów i ograniczeń poszczególnych sensorów pomiarowych.
Projekt został wykonany we współpracy z Muzeum Zamkiem Królewskim w Warszawie –oraz konsultowane z naukowcami z Liverpool John Moores University (Wielka Brytania).
