
Synergia i wykorzystanie zbiorów danych z zintegrowanej mobilnej platformy mapowania wyposażonej w LIDAR i GPR
Projekt realizowany jest w ramach konkursu CyberiADa-2. Kierownikiem projektu jest dr inż. Krzysztof Bakuła. W projekcie biorą udział pracownicy i studenci Wydziału Geodezji i Kartografii, Wydziału Inżynierii Lądowej oraz Albert-Ludwigs-University Freiburg.
Celem projektu jest synergia i analiza wieloźródłowych danych w inwentaryzacji nawierzchni drogowych. Najważniejszą częścią planowanych badań jest opracowanie metodyki fuzji danych związanych poprawną georeferencją wieloźródłowych danych trójwymiarowych, wzajemną kalibracją systemów nawigacyjnych z georadarem (GPR) i lidarem, a następnie wytworzenie metodyki analizy i wizualizacji danych z różnych, ale zintegrowanych źródeł dla uzyskiwania bardziej wiarygodnej i dokładniejszej informacji podczas inwentaryzacji obiektów inżynierskich. Podstawowym problemem do rozwiązania w odniesieniu do analizy i przetwarzania danych jest charakter obu rodzajów danych. Georadar dostarcza danych objętościowych, które w pełnym 3D pokazują budowę wewnętrzną poszczególnych warstw konstrukcyjnych pasa drogowego, natomiast skaner laserowy dostarcza szczegółowiej informacji o mikrotopografii nawierzchni pasa drogowego. Synergia danych lidar i GPR jest pożądana z przyczyn diagnostycznych. Dane ze skanowania laserowego pozwalają na badania powierzchni obiektu, jego struktury i inwentaryzacji otoczenia z rozdzielczością rzędu pojedynczych centymetrów, natomiast dane z pomiarów georadarowych umożliwiają badania wnętrza konstrukcji i określenie jej stanu. To co się dzieje wewnątrz drogi w kluczowy sposób bowiem oddziałuje na widoczne na powierzchni uszkodzenia czy deformacje. W ramach projektu przewidziano nawiązanie współpracy zagranicznej z ośrodkiem naukowych zajmujących się tematem integracji danych lidar i GPR, a także rozwinięciem współpracy z podmiotem komercyjnym zainteresowanym możliwościami wdrożeniowymi wypracowanych w projekcie rozwiązań. W ramach projektu powstanie także prototyp mobilnej, zintegrowanej platformy mapującej wyposażonej w lidar, georadar, systemy wizyjne i nawigacyjne.
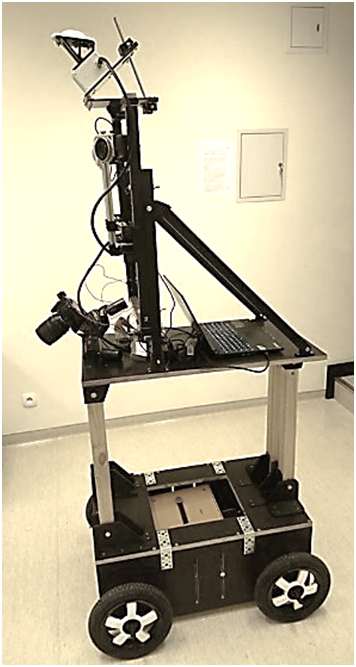
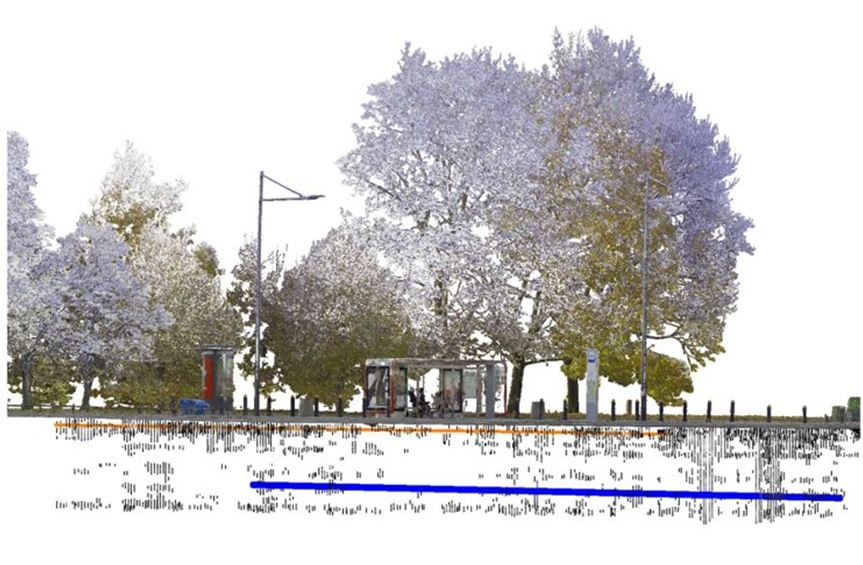
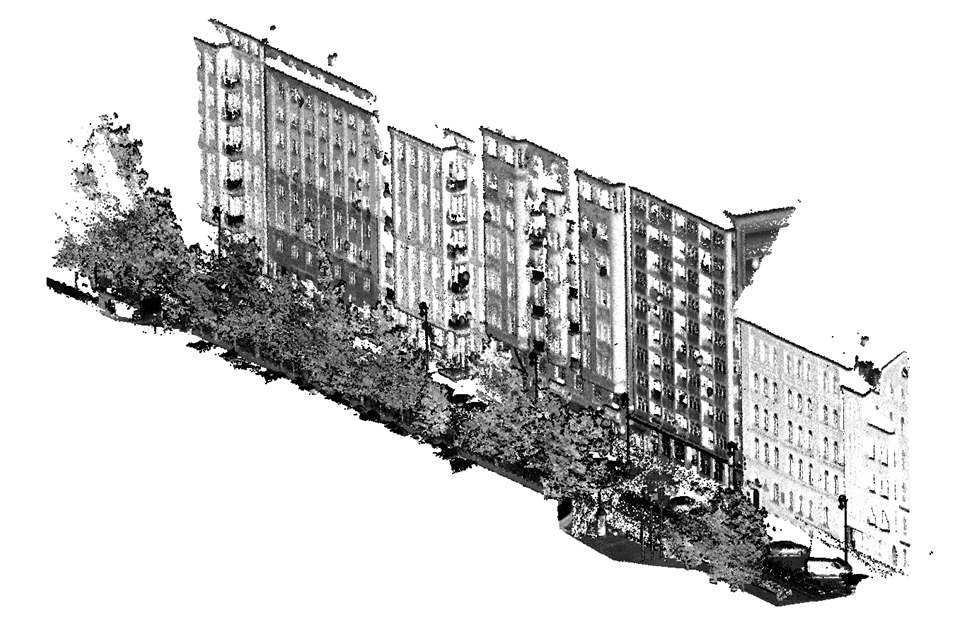
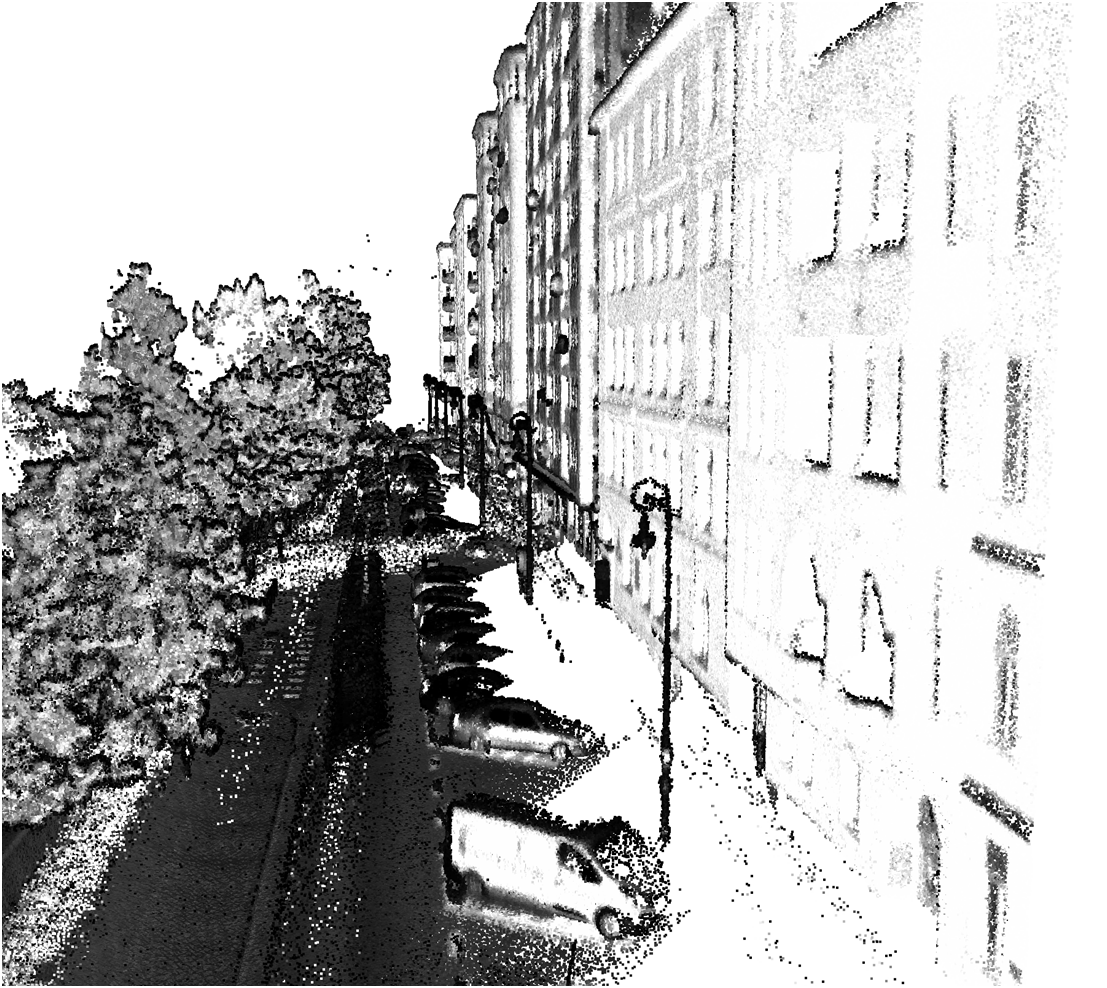
Po pierwszym roku trwania projektu powstała mobilna platforma niskobudżetowa wyposażona w: skaner laserowy, służący do nawigacji z użyciem algorytmów SLAM (równoczesnej orientacji i kartowania) w sytuacjach słabego sygnału GNSS, a także zbierania chmur punktów z otoczenia i nawierzchni, kamery boczne zbierające zdjęcia do generowania chmur punktów otoczenia, kamery fotografującej nawierzchnię do generowania wysokiej rozdzielczości ortofotomap HR i chmur punktów, georadaru inwentaryzującego grunt i infrastrukturę pod drogą, a także antenę GNSS. Całość platformy może być monitorowania w zakresie trajektorii przejazdu tachimetrem z funkcją automatycznego śledzenia. Platforma taka umożliwia pozyskanie kompleksowych danych 3D z bardzo wielu sensorów wzajemnie się uzupełniających w zakresie nawigacji w warunkach gęstej zabudowy oraz zbierania informacji 3D. Obecne prace dotyczą kalibracji systemu pomiarowego oraz integracji danych w czasie pozyskiwania. W końcówce projektu, platform i metodyka posłuży do realizacji przykładowych prac inwentaryzacyjnych obiektów inżynierskich oraz zabytkowych.
|
|
|
|
|
